水上로봇(USV) 선정…30㎝/s 이상 속도ㆍUI 편리성 모두 갖춰
원자력硏, 후속 현장적용 시험 통과 후 최종 완제품 수출 기대
우리 손으로 개발한 토종 ‘원자력 로봇’이 IAEA가 추진 중인 핵사찰 로봇요원으로 채택될 가능성이 한층 높아졌다.
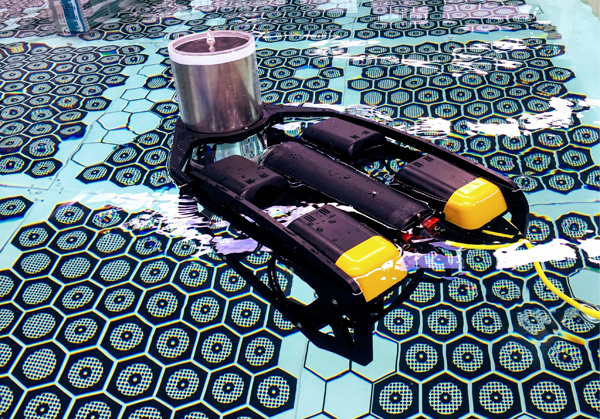
13일 한국원자력연구원(원장 하재주)은 ‘핵연료 점검 로봇(SCV, Spent fuel Check Vehicleㆍ사진)’이 ‘IAEA 로보틱스 챌린지’ 경연대회를 거쳐 최근 IAEA 수상(水上)로봇 부문에 선정됐다고 밝혔다.
IAEA는 1957년 설립 된 이후 로봇 개발에 직접 뛰어든 것은 이번이 처음이다. 현재 IAEA는 원자력 시설 내 사용후핵연료 저장 수조의 핵연료 사찰과 지상에 적재된 방사성폐기물 컨테이너 측정 업무를 수행해 오고 있다. 그러나 사찰요원들의 방사선 피폭 우려는 물론 전 세계적인 원자력산업계의 규모가 성장함에 따라 한정된 인력만으로 업무를 수행하기에는 어려운 현실에 봉착했다.
이에 IAEA는 이 같은 문제를 해결하고자 현재 사람이 수행하는 업무를 대신할 자율이동 사찰 로봇의 개발을 위해 지난해 8월 호주에서 ‘IAEA Robotics Challenge 2017(IRC 2017)’을 개최한 바 있다.
총 17개국 27개팀이 참가한 당시 대회는 수상로봇(USV, Unmanned Surface Vehicle)과 지상로봇(UGV, Unmanned Ground Vehicle)분야로 나눠져 예선과 모의시험 환경에서 직접 평가하는 본선으로 진행됐으며, 원자력연구원이 출품한 ‘핵연료 점검 로봇(SCV)’은 수상로봇 분야에서 영국, 헝가리 참가팀과 함께 최종 선정됐다.
이번에 선정된 로봇은 현장 적용 시험(Proof-of-concept)을 거쳐 최종 기술 수준이 증명될 경우 IAEA 요청에 따라 완제품으로 제작, 수출된다. 연구원은 IAEA와 함께 현장 적용 시험 단계의 세부사항을 논의 중으로, 올해 안에 실제 원전 내부에서 사용후핵연료 사찰 작업을 통해 로봇 성능을 시험할 계획이다.
수상로봇(USV)은 기존에 사찰요원이 광학 측정장비를 들고 수중에 저장된 사용후핵연료의 존재여부를 확인하던 작업을 대체하는 것이 목적이다. 이에 깊이 10m 이상의 핵연료 저장 수조에서 자율적으로 움직이며, 핵연료의 유무를 정확하게 관측할 수 있어야 한다. 또 사람이 직접 항공편을 이용해 세계 각지로 운송이 가능하도록 무게가 가볍고, 작업을 마친 로봇에 대한 빠른 제염 작업도 가능해야 한다.
한국원자력연구원 로봇?기기진단연구실 박종원 선임연구원은 “우리가 개발한 SCV는 자율주행은 물론 사용자가 편리하게 조종할 수 있는 유저 인터페이스(UI)를 갖추었으며, 필요시 사용자가 로봇을 특정 지점으로 이동시켜 장시간 자세하게 검사할 수 있다”고 설명했다.
박 연구원은 “저장수조는 보통 냉각수의 내부 순환에 따라 유속이 생기는데, 이에 떠밀려가지 않도록 다른 로봇보다 월등히 빠른 30㎝/s 이상의 속도를 낼 수 있다”고 덧붙였다.
또 원자력연구원의 ‘핵연료 점검 로봇’은 무게가 11㎏에 불과(로봇과 특수 제작된 가방포함 최대 23kg)해 항공 운송과 5분 이내의 재빠른 설치·운용이 가능하며, 외부로 노출된 부분이 단순해 제염이 쉬운 점도 높게 평가받았다.
하재주 한국원자력연구원장은 “원자력연구원이 개발한 ‘핵연료 점검 로봇(SCV)’이 경연대회에 참가한 로봇 중 유일하게 IAEA가 제시한 모든 실험을 성공적으로 수행했다”면서 “이는 향후 원자력연구원이 원자력 로봇 분야를 선도해 나갈 수 있는 좋은 기회이다. 최종적으로 완제품을 제작 세계 시장에 수출할 수 있도록 최선을 다하겠다”고 밝혔다.